
Abstract 抽象
In view of the complex and changing railroad operating environment, the GNSS/INS combined train positioning system is susceptible to rapid degradation of positioning accuracy when the GNSS signal is severely disturbed or lost, and an ODO auxiliary positioning GNSS/INS integrated train positioning method proposed. Combining with the actual train operation and considering the influence of IMU installation angle error on DR projection, a Kalman filter model applicable to the railroad environment derived, and the mathematical model of GNSS/INS loose combination positioning assisted by ODO given. Vehicular experiments show that the method can effectively suppress the dispersion of velocity and position errors of the integrated navigation and positioning system compared with the conventional DR algorithm with GNSS signal interruption.
针对铁路运行环境复杂多变,GNSS/INS组合列车定位系统在GNSS信号严重干扰或丢失时容易出现定位精度快速下降的问题,提出了一种ODO辅助定位GNSS/INS一体化列车定位方法。结合列车实际运行情况,考虑IMU安装角度误差对DR投影的影响,推导了适用于铁路环境的卡尔曼滤波模型,并给出了ODO辅助的GNSS/INS松散组合定位数学模型。车辆实验表明,与传统的具有GNSS信号中断的DR算法相比,该方法能够有效抑制集成导航定位系统的速度和位置误差的离散。
Keywords 关键字
Access provided by Shandong University Of Technology Librar.
Download conference paper PDF
访问由山东工业大学图书馆提供。下载会议论文 PDF
Similar content being viewed by others
其他人正在查看的类似内容

1 Introduction 1 引言
Train positioning systems based on GNSS/INS (Inertial Navigation System, INS) can provide accurate location information for trains in real time, reducing operating costs and improving operational efficiency. However, because of the complex and ever-changing operating environment of trains, the reception of satellite signals is susceptible to harsh and adverse environmental interference, resulting in signal loss [1]. Relying solely on low precision Micro Elector Mechanical System (MEMS) positioning can cause rapid dispersion of positioning errors, making it difficult to maintain long term positioning accuracy [2]. Therefore, in the event of satellite signal loss, the use of other navigation sensors to help position needs to be considered.
基于GNSS/INS(惯性导航系统,INS)的列车定位系统可以实时为列车提供准确的位置信息,降低运行成本,提高运行效率。然而,由于列车运行环境复杂多变,卫星信号的接收容易受到恶劣环境的干扰,导致信号丢失[1]。单纯依靠低精度的微电动机械系统(MEMS)定位会导致定位误差快速分散,难以保持长期定位精度[2]。因此,在卫星信号丢失的情况下,需要考虑使用其他导航传感器来帮助定位。
Many scholars have proposed corresponding solutions to the problems brought about by GNSS signal lock loss. CHEN Guangwu [3] proposed a method that uses RTK-GPS to replace GPS single-point positioning, but because RTK requires higher satellite signal quality, this method does not effectively improve the positioning accuracy after satellite signal lock loss; LIU Shedei [4] proposed a method that uses DR/MM to assist GPS positioning, but because of the complex environment of the train operation line and the process of map database construction Compared with these methods, the odometer (ODO) is a device that uses the rotation of the wheels to directly measure the speed of the carrier, which can provide more accurate positioning for the navigation system continuously after the GNSS signal is locked, thus solving the problem of rapid dispersion of vehicle positioning errors. Therefore, how to use ODO to improve the performance of GNSS/INS integrated navigation system has become a current research issue [5]. YIN Qing [6] propose a positioning method using improved Sage-Husa adaptive filtering to fuse GPS/ODO, which can effectively and quickly achieve automatic identification of track occupancy;ZHANG Liang [7] proposes a method based on EKF filtering algorithm to achieve integrated GPS/ODO train positioning, which can continue to maintain a certain level of positioning accuracy after GPS signal lockout; SONG Zhixue proposed a method to achieve integrated GNSS/INS/ODO intelligent vehicle navigation using fuzzy Kalman filtering, which can reduce the velocity error by about 50% with GNSS signal lockout; YAO Zhuo and LIU Pengfei proposed a method to use odometry to assist high-precision on-board GNSS/INS integrated positioning, which can effectively reduce the position error of the navigation system.
对于GNSS信号锁定损耗带来的问题,许多学者提出了相应的解决方案。陈光武[3]提出了一种利用RTK-GPS替代GPS单点定位的方法,但由于RTK对卫星信号质量要求较高,该方法不能有效提高卫星信号锁定丢失后的定位精度;刘舍黛[4]提出了一种利用DR/MM辅助GPS定位的方法,但由于列车运行线路环境复杂,地图数据库构建过程较多,里程表(ODO)是一种利用车轮旋转直接测量载体速度的装置, 在GNSS信号锁定后,可以连续为导航系统提供更精确的定位,从而解决车辆定位误差快速分散的问题。因此,如何利用ODO提高GNSS/INS综合导航系统的性能已成为当前的研究课题[5]。 尹青[6]提出一种采用改进Sage-Husa自适应滤波融合GPS/ODO的定位方法,可有效快速实现轨迹占用的自动识别;张亮[ 7] 提出了一种基于EKF滤波算法的GPS/ODO列车一体化定位方法,在GPS信号锁定后仍能继续保持一定的定位精度;宋志学提出了一种利用模糊卡尔曼滤波实现GNSS/INS/ODO智能车辆导航的方法,在GNSS信号锁定的情况下,速度误差降低约50%;姚卓、刘鹏飞提出了一种利用里程计辅助高精度车载GNSS/INS集成定位的方法,可有效降低导航系统的位置误差。
Therefore, to solve the problems of existing integrated train positioning schemes, this paper proposes a method of integrated GNSS/INS train positioning based on odometer assistance, and gives the error model of the odometer applicable to the train environment. In the process of integrated navigation, the GNSS/INS fusion algorithm is used when the satellite signal is good, and the INS/ODO fusion algorithm is used when the satellite signal is out of lock, and the two fusion algorithms can be casually switched according to the actual situation. Finally, the integrated navigation system is tested on board, and the results show it can locate the train position in real time with high accuracy in the complex and disturbing train operation environment, and effectively suppress the dispersion of positioning error after the satellite signal is lost, which has high adaptability and practical application value in engineering.
因此,针对现有列车综合定位方案存在的问题,该文提出一种基于里程表辅助的GNSS/INS列车综合定位方法,并给出了适用于列车环境的里程表误差模型。在综合导航过程中,卫星信号良好时采用GNSS/INS融合算法,卫星信号失锁时采用INS/ODO融合算法,两种融合算法可根据实际情况随意切换。最后,在车载上对集成导航系统进行了测试,结果表明,该系统能够在复杂、干扰的列车运行环境中高精度实时定位列车位置,有效抑制卫星信号丢失后定位误差的分散,在工程中具有较高的适应性和实际应用价值。
2 Train Positioning System
2 列车定位系统

Train integration positioning platform
列车一体化定位平台
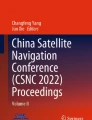
The platform structure of the train combination positioning system is shown in Fig. 1. The integrated train positioning system comprises a GNSS receiver, which receives satellite signals; an inertial guidance module, which outputs inertial unit measurements as a passive measurement terminal; and an LKJ box (train operation monitoring device), which sends out a message containing train odometer data every 100ms, with the odometer data mainly containing the train’s real-time speed and mileage. The integrated train positioning system can be functionally divided into a data acquisition module, a mode discrimination module, and a data fusion module. The flow of the integrated train positioning system is shown in Fig. 2.
列车组合定位系统的站台结构如图1所示。集成列车定位系统包括接收卫星信号的GNSS接收器;惯性制导模块,作为被动测量终端输出惯性单位测量值;LKJ盒(列车运行监控装置),每100ms发送一条包含列车里程表数据的消息,里程表数据主要包含列车的实时速度和里程。集成列车定位系统在功能上可分为数据采集模块、模式鉴别模块和数据融合模块。集成列车定位系统的流程如图2所示。

Block diagram of integrated train positioning system
一体化列车定位系统框图
The data acquisition module captures GNSS data, INS data, odometer data at a fixed frequency; the mode discrimination module determines the quality of the satellite signal based on the HDOP (Horizontal Dilution of Precision) of the GNSS data. When the HDOP is less than or equal to 1.5, the satellite positioning solution is at the highest confidence level. When the HDOP value is greater than 1.5, the satellite solution information is not credible. Here, the real-time velocity information provided by the odometer is first used to drive the velocity and position information of the carrier through the heading nudge algorithm, and then the difference is made with the velocity and position information calculated by the IMU, which is used as the quantitative vector in the KF filter, and the estimated error value is fed back to the heading nudge algorithm module. The integrated GNSS/INS/ODO-based navigation system can switch directly between integrated GNSS/INS and integrated INS/ODO modes depending on the quality of the satellite signal, thus providing accurate and continuous positioning for the safe operation of trains.
数据采集模块以固定频率采集GNSS数据、INS数据、里程表数据;模式鉴别模块根据GNSS数据的HDOP(精度水平稀释)确定卫星信号的质量。当HDOP小于或等于1.5时,卫星定位解决方案处于最高置信水平。当HDOP值大于1.5时,卫星求解信息不可信。这里,首先利用里程表提供的实时速度信息,通过航向轻推算法驱动载体的速度和位置信息,然后利用IMU计算的速度和位置信息进行差分,在KF滤波器中作为定量向量,将估计的误差值反馈给航向轻推算法模块。基于GNSS/INS/ODO的集成导航系统可以根据卫星信号的质量直接在集成GNSS/INS和集成INS/ODO模式之间切换,从而为列车的安全运行提供准确和连续的定位。
3 GNSS/INS Loosely Coupled Aided by ODO
3 个 GNSS/INS 松散耦合,由 ODO 辅助
3.1 GNSS/INS Loosely Coupled
3.1 GNSS/INS松耦合
GNSS/INS combination can divide into four combination modes: Loosely Coupled, Tightly Coupled, Super Tightly Coupled and Deeply Coupled, according to the difference of combination structure, information exchange and combination degree [11]. Loosely Coupled is a low-level GNSS/INS combination mode, and it showed its working principle in Fig. 3 below.
GNSS/INS组合根据组合结构、信息交换和组合程度的差异,可分为松耦合、紧耦合、超紧耦合和深度耦合四种组合模式[11]。松耦合是一种低级GNSS/INS组合模式,其工作原理如下图3所示。

GNSS/INS loosely coupled mode schematic
GNSS/INS松耦合模式原理图
In the integrated GNSS/INS loosely system, GNSS and INS work independently, and the sampling frequency of IMU is much higher than that of GNSS, so the velocity, position, and attitude information of the carrier can project continuously during the interval of GNSS sampling using INS mechanics choreography. When GNSS gives the observation information, the measurement data of both are input to the combined filter, and Kalman filter estimate and correct the INS error using GNSS information, so that the INS can maintain a high navigation accuracy.
在集成的GNSS/INS松散系统中,GNSS和INS独立工作,IMU的采样频率远高于GNSS,因此运载工具的速度、位置和姿态信息可以在GNSS采样间隔内利用INS力学编排连续投射。当GNSS给出观测信息时,将两者的测量数据输入到组合滤波器中,卡尔曼滤波利用GNSS信息对INS误差进行估计和修正,使INS保持较高的导航精度。
In the GNSS/INS combined system model, the error state vector x:
在 GNSS/INS 组合系统模型中,误差状态向量 x:
where is the small 3-axis attitude angle error, is the 3-axis velocity error, is the 3-axis position error, and are the gyro zero bias and accelerometer zero bias.Since the estimates of the carrier attitude errors (misalignment angles) are small in the railroad operating environment, a linear filter model can develop and the KF algorithm can satisfy the train positioning requirements. The state equation for the error state vector [12]:
其中 是小的3轴姿态角误差, 是3轴速度误差, 是3轴位置误差, 是陀螺仪零偏差和加速度计零偏差。由于铁路运行环境下载体姿态误差(错位角)的估计值较小,因此可以建立线性滤波模型,并利用KF算法满足列车定位要求。误差状态向量 的状态方程 [ 12]:
where is the one-step prediction of computed using , is the one-step transfer matrix of the system from time b to , mainly determined by the dynamical model of . and are the mean square error arrays of at moments and . is the variance array of the system noise sequence. The measurement update of x can be expressed as:
式中 ,是计算 方法的一步预测 , 是系统从时间 b到 的一步传递矩阵,主要由的 动力学模型确定。 和 是 at 时刻 和 的均方误差数组。 是系统噪声序列的方差数组。x 的测量更新可以表示为:
where, is the filter gain matrix, which is selected to minimize the mean square error array of the valuation ; is the measurement matrix. In this paper uses the velocity and position solved by the INS and the velocity and position error observed by GNSS as the measurement matrix of the filter; is the known system structure parameter matrix, which mainly reflects the relationship between the quantity measurement and the state quantity; is the observation information first variance matrix, which is used to show the quality of the measurement information.
其中, 是滤波器增益矩阵,选择该矩阵是为了最小化估值的均方误差数组 ; 是测量矩阵。本文以INS求解的速度和位置以及GNSS观测到的速度和位置误差作为滤波器的测量矩阵; 是已知的系统结构参数矩阵,主要反映量量与状态量的关系; 是观测信息第一方差矩阵,用于显示测量信息的质量。
However, in the loosely coupled system, since GNSS used as a separate system, the accuracy of this combination mode will decrease sharply with time when the GNSS signal interfere and loss lock, so it is necessary to introduce other sensors to aid position after the GNSS signal loses lock.
然而,在松散耦合系统中,由于GNSS是作为单独的系统使用的,当GNSS信号干扰和丢失锁定时,这种组合模式的精度会随着时间的推移而急剧下降,因此在GNSS信号失去锁定后,需要引入其他传感器来辅助定位。
3.2 Analysis of ODO Velocity Error
3.2 ODO速度误差分析
The ODO solution error is mainly because of the ODO scale factor error and IMU mounting angle error. Among them, different road driving conditions, tire air pressure, and wheel mainly affected the ODO scale factor error deformation; the difficulty of ensuring that mainly caused the IMU mounting angle error the inertial coordinate system () and the carrier coordinate system () coincide exactly during the IMU installation [13]. The ODO scale factor is denoted by . It is assumed that there is a small amount of installation error angle between the system to the system, and it denoted the installation error pitch angle around the horizontal axis of the vehicle by . The installation error cross-roll angle around the longitudinal axis of the vehicle denote by . The installation error heading angle around the vertical axis of the vehicle denoted by . Platform misalignment angle error of the DR system approximate by the platform misalignment angle error of the inertial system, then the transformation matrix from the carrier coordinate system to the inertial coordinate system like Eq. (7).
ODO求解误差主要是由于ODO比例因子误差和IMU安装角误差。其中,不同的道路行驶条件、轮胎气压和车轮主要影响ODO比例因子误差变形;在IMU安装过程中,惯性坐标系( )和载体坐标系( )完全重合,主要导致IMU安装角度误差的难度[13]。ODO 比例因子用 表示。假设 系统与 系统之间存在少量的安装误差角,并用 表示 绕车辆水平轴的安装误差俯仰角。绕车辆纵轴的安装误差横滚角用 表示。绕车辆垂直轴的安装误差航向角,用 表示。DR系统的平台错位角度误差 近似于惯性的平台错位角度误差,然后从载波坐标系到惯性坐标系的变换矩阵,如方程(7)。
For the railroad operating environment, because the driving environment of the tracks basically will not change, the train wheels are metal wheels, limited by wheel wear and wheel air pressure changes and wheel deformation in a short period, so the odometer scale factor can ignore, so that .
对于铁路运行环境来说,由于轨道的行驶环境基本不会改变,列车车轮是金属车轮,受限于车轮磨损和车轮气压变化和车轮在短时间内变形,所以里程表比例因子 可以忽略不计,使 得。
Using by the velocity of the odometer output in the carrier coordinate system, the actual form of in the inertial coordinate system like Eq. (8).[14]
利用里 程表在载体坐标系中输出的速度,在惯性坐标系中的实际形式 如方程(8)。[ 14]
By further processing the above Eq. (8), ignoring the second-order and high-order small quantities of each error term, and substituting , it can get the odometer speed expression under the train operation environment as Eq. (9).
通过对上述方程(8)进行进一步处理,忽略各误差项的二阶和高阶小量,代入 ,得到列车运行环境下的里程表速度表达式,如式(9)。
3.3 Position Model Aided by ODO
3.3 ODO辅助位置模型
As the discrimination of the installation error heading angle depends on the estimation accuracy of the INS platform misalignment angle , which requires a high accuracy of the inertial unit, the MEMS-IMU used in this paper is low accuracy, so is not suitable as a state quantity.At the meantime, because of the vulnerability of the mounting error pitch angle to carrier load variation, it is generally difficult to estimate accurately through the KF filter, and is not suitable as a state quantity. Based on Eq. (1), the error state vector in the original GNSS/INS combined model system augmented with the projected velocity error and position error in the odometer heading laps error, and the state volume of the filter augmented from the original 15 dimensions to 21 dimensions, resulting in Eq. (10).
由于安装误差航向角 的判别取决于INS平台错位角 的估计精度,对惯性单元的精度要求很高,因此本文使用的MEMS-IMU精度较低,因此 不适合作为状态量。同时,由于安装误差俯仰角容易受到载荷变化的影响,通常很难通过KF滤波器准确估计,不适合 作为状态量。基于式(1),将原GNSS/INS组合模型系统中的误差状态向量 与里程表航向圈误差中的投影速度误差 和位置误 差相增强,滤波器的状态体积从原来的15维增加到21维,得到式(10)。
Then, combine with the above Eqs. (2), (3), (4), (5) and (6), it can get the state space model of the integrated navigation system as Eq. (11).
然后,结合上述方程。( 2 ), ( 3), ( 4), ( 5) 和 ( 6),可得到集成导航系统的状态空间模型,如方程(11)。
where F is the system state transfer matrix, G is the system noise distribution matrix, and W is the system state noise array. Combining with the system state transfer matrix given in the literature [15] can be derive the state transfer matrix of this paper as Eq. (12).
其中 F 是系统状态传递矩阵,G 是系统噪声分布矩阵,W 是系统状态噪声阵列。结合文献[15]中给出的系统状态传递矩阵,可以推导出本文的状态传递矩阵,如方程(12)。
The difference between the velocity and position derived from the INS according to the mechanical choreography formula and the velocity and position observed by GNSS used as the system measurement matrix when the integrated system integrated as GNSS/INS, as shown in Eqs. (13) and (14).
当集成系统集成为GNSS/INS时,根据机械编排公式从INS得出的速度和位置与GNSS观测到的速度和位置之间的差异,GNSS用作系统测量矩阵,如方程所示。( 13) 和 ( 14)。
The difference between the velocity and position solved by the INS and the velocity and position of the DR use as the measurement matrix of the system when the integrated system integrated as INS/ODO, as shown in Eqs. (15) and (16).
当集成系统集成为INS/ODO时,INS求解的速度和位置与DR的速度和位置之间的差异用作系统的测量矩阵,如方程所示。( 15) 和 ( 16)。
4 Experiment and Analysis
4 实验与分析
Experiments verified the reliability of the odometer-assisted GNSS/INS integrated positioning algorithm proposed in this paper and were conducted onboard in a real operating environment. The experimental vehicle is a Shenhua 24-axle heavy-duty locomotive developed by China Railway Zhuzhou Electric Locomotive Company Limited, and the experimental route is a section of the mainline freight railway line containing a tunnel. First, some hardware parameters for the on-board test are introduced. In which, the satellite receiver adopts UB4B0M full system full-frequency compact high-precision board, single-point positioning data output frequency between 1 Hz30 Hz, this experiment will output data frequency of 1 Hz; the inertial unit module selects DM-IMU200A, with high reliability and high stability MEMS three-axis gyroscope and three-axis accelerometer, its main parameters are shown in Table 1 and Table 2.
实验验证了本文提出的里程表辅助GNSS/INS集成定位算法的可靠性,并在实际操作环境中进行。实验车辆为中铁株洲电力机车有限公司研制的神华24轴重型机车,实验路线为干线货运铁路线的一段内含隧道。首先,介绍了一些用于板载测试的硬件参数。其中,卫星接收机采用UB4B0M全系统全频紧凑型高精度板,单点定位数据输出频率在1Hz30Hz之间,本实验将输出1Hz的数据频率;惯性单元模块选用DM-IMU200A,具有高可靠性、高稳定性的MEMS三轴陀螺仪和三轴加速度计,其主要参数见表1和表2。
表 1.加速度计误差参数。
表 2.陀螺仪错误参数。
Install the integrated navigation system into the on-board LKJ box, and it showed the experiment platform in Fig. 4 below. In the on-board experiment platform, the LKJ box transfers the GNSS signal into the integrated navigation and positioning system through the satellite antenna transfer line, and sends the odometer data to the integrated navigation and positioning system through the backplate.
将集成导航系统安装到车载LKJ箱中,它显示了下面的图4中的实验平台。在车载实验平台中,LKJ箱通过卫星天线传输线将GNSS信号传输到集成导航定位系统中,并通过背板将里程表数据发送到集成导航定位系统。

Vehicle experiment platform
车辆实验平台
In the experiment, the train maintains a speed of 25 km/h40 km/h from point 1 to point 2. The total length of the line is 10,430 m, of which the tunnel length is 1,558 m. The train passage time is approximately 125 s, while considering the satellite cold start time, the satellite signal loss time is approximately 135 s when passing through the tunnel. The experimental route chart for the on-board test is shown in Fig. 4 below.
在实验中,列车从点 1 到点 2 保持 25 km/h40 km/h 的速度。线路总长度为10,430米,其中隧道长度为1,558米。列车通过时间约为125 s,而考虑卫星冷启动时间,通过隧道时卫星信号丢失时间约为135 s。车载测试的实验路线图如下图4所示。

Vehicle track 车辆轨迹
To verify the positioning accuracy and the ability to suppress positioning errors of the algorithm proposed in this paper after GNSS signal loss of lock, we used three different integrated positioning algorithms for comparison during the on-board experiments. As shown in Fig. 5 above and Fig. 6 below, the white curve shows the train positioning trajectory with a good GNSS signal; the green curve shows the real tunnel trajectory; the blue curve shows the positioning trajectory of Algorithm 1, using the integrated GNSS/INS positioning algorithm, which can only rely on INS for positioning when the GNSS signal is out of lock, and the positioning error will disperse rapidly; the yellow curve shows the positioning trajectory of Algorithm 2, using the red curve shows the trajectory of Algorithm 3, which is the integrated positioning algorithm proposed in this paper, and has a better ability to suppress the dispersion of positioning errors compared with the other two algorithms.
为验证本文提出的算法在GNSS信号失锁后的定位精度和抑制定位误差的能力,在机载实验中采用了3种不同的集成定位算法进行比较。如上图5和图6所示,白色曲线显示了具有良好GNSS信号的列车定位轨迹;绿色曲线表示真实的隧道轨迹;蓝色曲线为算法1的定位轨迹,采用集成GNSS/INS定位算法,当GNSS信号失锁时只能依靠INS进行定位,定位误差会迅速消散;黄色曲线表示算法2的定位轨迹,红色曲线表示算法3的轨迹,该算法是本文提出的综合定位算法,与其他两种算法相比,具有更好的抑制定位误差离散的能力。

Vehicle track partial enlargement
车辆轨道部分扩大
Further to verify the ability of the algorithm proposed in this paper to suppress the positioning error after GNSS signal loss lock, the velocity error and position error of the three algorithms after GNSS signal loss lock were analysed and compared. Figure 7 below shows the comparison of eastward velocity error, Fig. 8 below shows the comparison of northward velocity error, Fig. 9 below shows the comparison of latitude error and Fig. 10 below shows the comparison of longitude error. Tables 3 and 4 are the MAX and MSE for the velocity and position errors, respectively.
为进一步验证本文所提算法抑制GNSS信号丢失锁定后定位误差的能力,对GNSS信号丢失锁定后的3种算法的速度误差和位置误差进行了分析和比较。下图7显示了东向速度误差的比较,图8显示了向北速度误差的比较,图9显示了纬度误差的比较,图10显示了经度误差的比较。表 3 和表 4 分别是速度误差和位置误差的 MAX 和 MSE。

Easterly velocity error (m/s)
东风速度误差 (m/s)

Northerly velocity error (m/s)
偏北风速误差 (m/s)

Latitude error (m) 纬度误差 (m)

Longitude error (m) 经度误差 (m)
According to Fig. 7, Fig. 8, Fig. 9, Fig. 10 and Table 3, the proposed Algorithm 3 is significantly better than Algorithm 1, with substantial improvement in both velocity error and position error; in the comparison with Algorithm 2, the MAX of eastward velocity error decreases from 0.0885 to 0.0276, and MSE decreases from 0.0272 to 0.0197; MAX of northward velocity error decreases from −0.1048 to −0.0601, and MSE decreases from 0.0288 to 0.0226; MAX of latitude error decreases from 35.1383 to 3.7396, and MSE decreases from 14.0507 to 1.0226. Decreased from −0.1048 to −0.0601, MSE decreased from 0.0288 to 0.0226; the MAX of latitude error decreased from 35.1383 to 3.7396, MSE decreased from 14.0507 to 1.5321, positioning accuracy improved by 89.09%; and the MAX of longitude error decreased from −31.6569 to −21.3141, MSE decreased from 15.1437 to 6.9819, and the positioning accuracy improved by 53.89%.
根据图7、图8、图9、图10和表3,所提算法3明显优于算法1,速度误差和位置误差均有显著改善;与算法2相比,向东速度误差MAX从0.0885降低到0.0276,MSE从0.0272降低到0.0197;向北速度误差的最大值从-0.1048降低到-0.0601,MSE从0.0288降低到0.0226;纬度误差最大值从 35.1383 降低到 3.7396,MSE 从 14.0507 降低到 1.0226。MSE从-0.1048下降到-0.0601,MSE从0.0288下降到0.0226;纬度误差MAX从35.1383降低到3.7396,MSE从14.0507降低到1.5321,定位精度提高89.09%;经度误差MAX从−31.6569降低到−21.3141,MSE从15.1437降低到6.9819,定位精度提高53.89%。
表 3.速度误差分析
表 4.位置误差分析
5 Conclusions 5 结论
This paper proposes an odometer-assisted GNSS/INS integrated navigation system to address the problem that the accuracy of the integrated navigation system decreases when the existing integrated positioning method for trains encounters GNSS signal loss lock. Based on the actual train operating environment, it derived the state equation and the measurement equation of the integrated navigation system. On-board experiments show that the odometer-assisted GNSS/INS integrated navigation system can improve the latitude error and longitude error by 89.08% and 53.89% respectively compared with the traditional DR navigation system in the case of GNSS signal loss. The algorithm proposed in this paper has good applicability in the integrated positioning system and has certain environmental adaptability and practical application value in train engineering use.
针对现有列车综合定位方法遇到GNSS信号丢失锁定时,集成导航系统精度下降的问题,提出了一种里程表辅助GNSS/INS综合导航系统。基于列车实际运行环境,推导了综合导航系统的状态方程和测量方程。机载实验表明,在GNSS信号丢失的情况下,里程表辅助GNSS/INS综合导航系统比传统DR导航系统分别可将纬度误差和经度误差提高89.08%和53.89%。该算法在综合定位系统中具有较好的适用性,在列车工程应用中具有一定的环境适应性和实际应用价值。
References 引用
Yang, J., Yu, Y., Chen, G., Liu, S., Wang, D.: Research on inertial navigation error supprssion based on vehicle motion constrains. J. China Railway Society 42(2) 70–77 (2020)
Yang, J., Yu, Y., Chen, G., Liu, S., Wang, D.: 基于车辆运动约束的惯性导航误差辅助研究.中国铁道学会学报, 42(2): 70–77 (2020)Skog, I., Handel, P.: In-car positioning and navigation technologies:a survey. IEEE Trans. Intelligent Transportation Systems 25(2), 264–280 (2009)
Skog, I., Handel, P.:车载定位和导航技术:一项调查。IEEE Trans. 智能交通系统 25(2), 264–280 (2009)Chen, G., Liu, H., Wei, Z., Zhang, L.: Reserach on RTK-GPS/INS-based train combination positioning method. J. China Railway Society 10-0067-09 (2020)
Chen, G., Liu, H., Wei, Z., Zhang, L.: 基于RTK-GPS/INS的列车组合定位方法研究.铁道学会学报 10-0067-09 (2020)Liu, S., Chen, G., Wang, D., Xu, S.: Train integrated positioning method based on GPS/DR/MM. J. Railway Science Eng. 2(2), 474–482 (2018)
Liu, S., Chen, G., Wang, D., Xu, S.: 基于GPS/DR/MM. 的列车综合定位方法。 铁路科学工程 2(2), 474–482 (2018)Wu, Y.: Versatile Land navigation using inertrial sensors and odomery:self-calibration. In: Motion Alignment and Positioning. Inertial Sensors and Systems Symposium.Germany, pp. 11–19 (2014)
Wu, Y.:使用无误传感器和自校准的多功能陆地导航。在:运动对齐和定位。Inertial Sensors and Systems Symposium.Germany(惯性传感器与系统研讨会),第 11–19 页(2014 年)Yin, Q.: One Datas Fusion Method of Train Integrated Positioning System Based on GNSS/ODO. Beijing Jiaotong University, Beijing (2010)
尹婷: 基于GNSS/ODO的列车综合定位系统数据融合方法.北京交通大学, 北京 (2010)Zhang, L.: Reserach on EKF based GPSODO Integrated Train Positioning Method. Beijing Jiaotong University, Beijing (2016)
Zhang, L.:基于EKF的GPSODO集成列车定位方法的研究。北京交通大学, 北京 (2016)Zhixue, S.O.N.G.: Research on intelligent vehicle Navigation and Position Algorithms Based on GPS/SINS/ODO. Beijing University Of Technology, Beijing (2017)
S.O.N.G.志学:基于GPS/SINS/ODO的智能汽车导航与定位算法研究.北京工业大学, 北京 (2017)Yao, Z., Zhang, H.: Performance an alysis on vehicle GNSS/INS integrated navigation system aided by odometer. J. Geodesy Geodynamics 38(02), 206210 (2018)
Yao, Z., Zhang, H.:在里程表辅助下对车载GNSS/INS集成导航系统进行分析。大地测量学地球动力学杂志 38(02), 206210 (2018)Liu, P.: High-precision vehicle GNSS/INS integrated navigation system aided by Odometer. Optics Precision Eng. 28(04), 979987 (2020)
Liu, P.: 里程表辅助的高精度车载GNSS/INS综合导航系统.光学精密工程 28(04), 979987 (2020)Wang, X., Li, Y., Ji, X.: Integrated Navigation Technology based on SINS/GPS. Beihang University Press, Beijing (2014)
Wang, X., Li, Y., Ji, X.:基于SINS/GPS的综合导航技术。北京航空航天大学出版社, 北京 (2014)Quan, W., Liu, B., Gong, X., Fang, J.: INS/CNS/GNSS Integrated Navigation Research. National Defense Industry Press, Beijing (2011)
Quan, W., Liu, B., Gong, X., Fang, J.: INS/CNS/GNSS 综合导航研究.国防工业出版社,北京(2011)Yan, G., Qing, Y., Yang, B.: Research on Error Compensation Technology of Vehicle-Based DR. J. Northwestern Polytechnical University 01–0026–05 (2006)
Yan, G., Qing, Y., Yang, B.: 基于车辆的误差补偿技术研究 Dr. J. 西北工业大学 01–0026–05 (2006)Bai, L., Yan, G., Zhu, Q.: SINS/ODO integrated navigation system. J. Projectiles, Rockets Missiles and Guidance 33(06) (2013)
Bai, L., Yan, G., Zhu, Q.: SISS/ODO集成导航系统.J. 射弹、火箭、导弹和制导 33(06) (2013)Yan, G.: Research on Autonomous Position and Azimuth Determining Systems for Land Vehicles. Northwestern Polytechnical University, Xian (2006)
Yan, G.:陆地车辆自主位置和方位角确定系统研究。西北工业大学, 西安 (2006)
Author information 作者信息
Authors and Affiliations 作者和单位
Corresponding author 通讯作者
Editor information 编辑信息
Editors and Affiliations 编辑和隶属关系
Rights and permissions 权利和权限
Copyright information 版权信息
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
© 2023 作者,经 Springer Nature Singapore Pte Ltd. 独家许可。
About this paper 关于本文

Cite this paper 引用本文
Zhou, X., Chen, G., Si, Y., Li, P., Zhai, H. (2023). A Research on a Integrated GNSS/INS/ODO Train-Based Positioning Technology.
In: Yan, L., Duan, H., Deng, Y. (eds) Advances in Guidance, Navigation and Control. ICGNC 2022. Lecture Notes in Electrical Engineering, vol 845. Springer, Singapore. https://doi.org/10.1007/978-981-19-6613-2_139
周, X., 陈, G., 思, Y., 李, P., 翟, H. (2023).基于GNSS/INS/ODO列车的集成定位技术研究.在:Yan,L.,Duan,H.,邓,Y.(编辑)制导,导航和控制的进展。ICGNC 2022 年。电气工程讲义,第 845 卷。施普林格,新加坡。https://doi.org/10.1007/978-981-19-6613-2_139
Download citation 下载引文
DOI: https://doi.org/10.1007/978-981-19-6613-2_139
Published 发表:
Publisher Name 发布者名称: Springer, Singapore Springer, 新加坡
Print ISBN 打印 ISBN: 978-981-19-6612-5
Online ISBN 在线ISBN: 978-981-19-6613-2
eBook Packages 电子书套餐: Intelligent Technologies and Robotics
智能技术与机器人技术Intelligent Technologies and Robotics (R0)
智能技术与机器人 (R0)
