在本节中,通过一些仿真示例来说明获得的解析结果。
重试
错误原因
例 4.1.考虑以下航天器交会系统[27\u201241],它描述了目标和追击者之间的相对运动。
重试
错误原因
{[{:(x^(˙))(t)=Ax(t)+ bar(B_(1)u(t-1))+int_(0)^(+oo)B_(0)(theta)u(t-theta)d theta],[{:y(t)=epsilon_(1)x(t-0.5)+ bar(int_(theta)^(+oo)C_(0)(theta)x(t-theta)d theta),sub)(harr t)]:}\left\{\begin{array}{l}
\left.\dot{x}(t)=A x(t)+\overline{B_{1} u(t-1}\right)+\int_{0}^{+\infty} B_{0}(\theta) u(t-\theta) d \theta \\
\left.y(t)=\epsilon_{1} x(t-0.5)+\overline{\int_{\theta}^{+\infty} C_{0}(\theta) x(t-\theta) d \theta}, \subset\right)(\leftrightarrow t)
\end{array}\right.
{:[A=[[0,0,0,1,0,0],[0,0,0,0,1,0],[0,0,0,0,0,1],[3omega^(2),0,0,0,2omega,0],[0,0,0,-2omega,0,0],[0,0,-omega^(2),0,0,0]]","],[B_(1)=[[0,0,0],[0,0,0],[0,0,0],[1,0,0],[0,0,0],[0,0,0]]","B_(0)(theta)=[[0,0,0],[0,0,0],[0,0,0],[0,0,0],[0,1,0],[0,0,1]]epsilon(theta)","],[C_(1)=[[1,0,0,0,0],[0,0,0,0,0],[0,0,0,0,0],[0]]","quadC_(0)(theta)=[[0,0,0,0,0,0],[0,1,0,0,0,0],[0,0,1,0,0,0]]epsi(theta)","]:}\begin{aligned}
& A=\left[\begin{array}{cccccc}
0 & 0 & 0 & 1 & 0 & 0 \\
0 & 0 & 0 & 0 & 1 & 0 \\
0 & 0 & 0 & 0 & 0 & 1 \\
3 \omega^{2} & 0 & 0 & 0 & 2 \omega & 0 \\
0 & 0 & 0 & -2 \omega & 0 & 0 \\
0 & 0 & -\omega^{2} & 0 & 0 & 0
\end{array}\right], \\
& B_{1}=\left[\begin{array}{lll}
0 & 0 & 0 \\
0 & 0 & 0 \\
0 & 0 & 0 \\
1 & 0 & 0 \\
0 & 0 & 0 \\
0 & 0 & 0
\end{array}\right], B_{0}(\theta)=\left[\begin{array}{llll}
0 & 0 & 0 \\
0 & 0 & 0 \\
0 & 0 & 0 \\
0 & 0 & 0 \\
0 & 1 & 0 \\
0 & 0 & 1
\end{array}\right] \epsilon(\theta), \\
& C_{1}=\left[\begin{array}{lllll}
1 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 0 \\
0
\end{array}\right], \quad C_{0}(\theta)=\left[\begin{array}{llllll}
0 & 0 & 0 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 & 0 & 0
\end{array}\right] \varepsilon(\theta),
\end{aligned}
omega > 0,epsilon(theta)\omega>0, \epsilon(\theta)和epsi(theta)\varepsilon(\theta)是 上的两个非负函数[0,oo)[0, \infty).可以验证lambda(A)={0,0,-omega l,-omega l,omega l,omega l}\lambda(A)=\{0,0,-\omega l,-\omega l, \omega l, \omega l\},这意味着满足假设 1。让 orbit rateomega=7.2722 xx10^(-5)rad//s,epsilon(theta)=4thetae^(-2theta)\omega=7.2722 \times 10^{-5} \mathrm{rad} / \mathrm{s}, \epsilon(\theta)=4 \theta e^{-2 \theta}和系统状态的初始函数x(-theta)=[10000,5000,-10000,2,1,-3]^(T),theta in[0,+oo)x(-\theta)=[10000,5000,-10000,2,1,-3]^{T}, \theta \in[0,+\infty),这与 [27] 中的相同。
重试
错误原因
在实践中,追逐者航天器并不总是能获得目标航天器的完整实时轨道信息。例如,由于目标航天器或地面设备的故障,两个航天器之间没有通信时,就会发生这种情况。因此,采用 Observer (8) 来估计系统状态。假设rho=0.01,gamma=0.01,epsi(theta)=thetae^(-theta)\rho=0.01, \gamma=0.01, \varepsilon(\theta)=\theta e^{-\theta}和观察者的初始函数hat(x)(-theta)=[9500,5500,-9600,-2,3,-5]^(T),theta in[0,+oo)\hat{x}(-\theta)=[9500,5500,-9600,-2,3,-5]^{T}, \theta \in[0,+\infty).一个有
重试
错误原因
{:[B=e^(-A)B_(1)+int_(0)^(+oo)e^(-A theta)B_(0)(theta)d theta],[=[[-1,1.09 xx10^(-4),0],[-7.27 xx10^(-5),-1,0],[0,0,-1],[1,-1.45 xx10^(-4),0],[1.45 xx10^(-4),1,0],[0,0,1]]","],[C=C_(1)e^(-0.5 A)+int_(0)^(+oo)C_(0)(theta)e^(-A theta)d theta],[=[[1,0,0,-0.5,1.82 xx10^(-5)],[9.23 xx10^(-12),1,0,-4.36 xx10^(-4),-2],[0,0,1,0,0]]]:}\begin{aligned}
B & =e^{-A} B_{1}+\int_{0}^{+\infty} e^{-A \theta} B_{0}(\theta) d \theta \\
& =\left[\begin{array}{ccc}
-1 & 1.09 \times 10^{-4} & 0 \\
-7.27 \times 10^{-5} & -1 & 0 \\
0 & 0 & -1 \\
1 & -1.45 \times 10^{-4} & 0 \\
1.45 \times 10^{-4} & 1 & 0 \\
0 & 0 & 1
\end{array}\right], \\
C & =C_{1} e^{-0.5 A}+\int_{0}^{+\infty} C_{0}(\theta) e^{-A \theta} d \theta \\
& =\left[\begin{array}{ccccc}
1 & 0 & 0 & -0.5 & 1.82 \times 10^{-5} \\
9.23 \times 10^{-12} & 1 & 0 & -4.36 \times 10^{-4} & -2 \\
0 & 0 & 1 & 0 & 0
\end{array}\right]
\end{aligned}
和
L=[[0.02,0,0],[0,0.0202,0],[0,0,0.0202],[0.0001,0,0],[0,0.0001,0],[0,0,0.0001]]L=\left[\begin{array}{ccc}
0.02 & 0 & 0 \\
0 & 0.0202 & 0 \\
0 & 0 & 0.0202 \\
0.0001 & 0 & 0 \\
0 & 0.0001 & 0 \\
0 & 0 & 0.0001
\end{array}\right]
然后我们可以验证假设 2 和 3 是否得到满足。此外,还存在一个非递增函数h(theta)=4e^(-(3)/(4)theta) > 0,theta in[0,+oo)h(\theta)=4 e^{-\frac{3}{4} \theta}>0, \theta \in[0,+\infty)使得int_(0)^(+oo)h(theta)x(-theta)d theta < +oo\int_{0}^{+\infty} h(\theta) x(-\theta) d \theta<+\infty和int_(0)^(+oo)h(theta) hat(x)(-theta)d theta < +oo\int_{0}^{+\infty} h(\theta) \hat{x}(-\theta) d \theta<+\infty.因此,从定理 1 可以得出,控制器 (21) 下的闭环系统 (32) 是全局渐近稳定的。状态响应和观察者错误响应分别如图 2 和图 3 所示。可以观察到,state 和 observer 误差最终都接近于 0。
重试
错误原因
例 4.2.考虑描述惯性轮摆的四阶时滞系统[27,40][27,40]如下
重试
错误原因
{[x^(˙)(t)=Ax(t)+B_(1)u(t-1)+int_(0)^(+oo)B_(0)(theta)u(t-theta)d theta],[y(t)=C_(1)u(t-0.5)+int_(0)^(+oo)C_(0)(theta)x(t-theta)d theta]:}\left\{\begin{array}{l}
\dot{x}(t)=A x(t)+B_{1} u(t-1)+\int_{0}^{+\infty} B_{0}(\theta) u(t-\theta) d \theta \\
y(t)=C_{1} u(t-0.5)+\int_{0}^{+\infty} C_{0}(\theta) x(t-\theta) d \theta
\end{array}\right.
{:[A=[[0,1,0,0],[0,0,1,0],[0,0,0,1],[0,0,0,0]]","],[B_(1)=[[0],[0],[0],[1]]","quadB_(0)(theta)=[[0],[0],[0],[1]]4thetae^(-2theta)","]:}\begin{aligned}
& A=\left[\begin{array}{llll}
0 & 1 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1 \\
0 & 0 & 0 & 0
\end{array}\right], \\
& B_{1}=\left[\begin{array}{l}
0 \\
0 \\
0 \\
1
\end{array}\right], \quad B_{0}(\theta)=\left[\begin{array}{l}
0 \\
0 \\
0 \\
1
\end{array}\right] 4 \theta e^{-2 \theta},
\end{aligned}
C_(1)=[1,0,0,0]C_{1}=[1,0,0,0]和C_(0)(theta)=C_(1)epsi(theta)C_{0}(\theta)=C_{1} \varepsilon(\theta).可以计算出lambda(A)\lambda(A)为零,而int_(0)^(+oo)4thetae^(-2theta)d theta=1\int_{0}^{+\infty} 4 \theta e^{-2 \theta} d \theta=1.在这种情况下,因此采用了控制器 (30)。选择其他参数和初始条件与 [27] 中的相同。观察者ver(8)\operatorname{ver}(8)用于估计系统状态。让rho=0.2,gamma=0.2\rho=0.2, \gamma=0.2和epsi(theta)=thetae^(-theta)\varepsilon(\theta)=\theta e^{-\theta}.可以计算
重试
错误原因
{:[B=B_(1)+int_(0)^(+oo)B_(0)(theta)d theta=[0","0","0","2]^(T)","],[C=C_(1)+int_(0)^(+oo)C_(0)(theta)d theta=[2,0,0,0]_]:}\begin{aligned}
& B=B_{1}+\int_{0}^{+\infty} B_{0}(\theta) d \theta=[0,0,0,2]^{T}, \\
& C=C_{1}+\int_{0}^{+\infty} C_{0}(\theta) d \theta=\underline{[2,0,0,0]}
\end{aligned}
和
L=[0.4,0.12,0.016,0.0008]^(T)L=[0.4,0.12,0.016,0.0008]^{T}
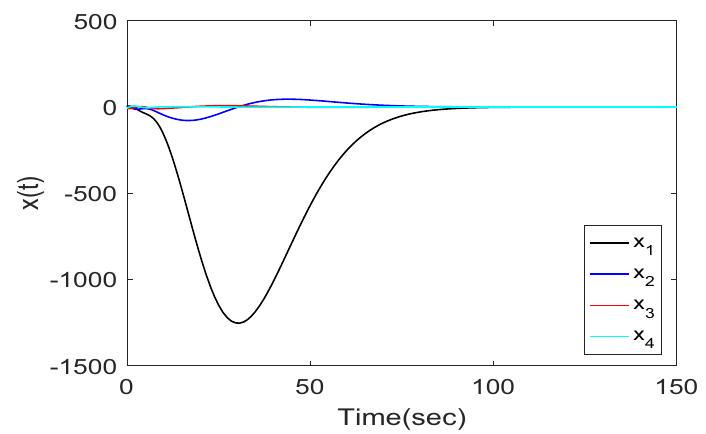
可以验证假设 5 得到满足。因此,我们可以从定理 2 中得出,控制器 (30) 的闭环系统 (33) 是全局渐近稳定的。状态响应和观察者错误响应分别在图 4 和 5 中给出。可以观察到,状态误差和观察者误差逐渐收敛为零。
重试
错误原因
{:[{[x^(˙)(t)=Ax(t)+int_(0)^(+oo)B_(0)(theta)u(t-theta)d theta],[y(t)=int_(0)^(+oo)C_(0)(theta)x(t-theta)d theta]:}],[A=[[0,1,1,0],[-1,0,0,1],[0,0,0,1],[0,0,-1,0]]","quadB_(0)=[[0],[0],[0],[1]]epsilon(theta)","quadC_(0)(theta)=[[1,0,0]]]]epsi(theta),\left.\begin{array}{l}
\left\{\begin{array}{l}
\dot{x}(t)=A x(t)+\int_{0}^{+\infty} B_{0}(\theta) u(t-\theta) d \theta \\
y(t)=\int_{0}^{+\infty} C_{0}(\theta) x(t-\theta) d \theta
\end{array}\right. \\
A=\left[\begin{array}{cccc}
0 & 1 & 1 & 0 \\
-1 & 0 & 0 & 1 \\
0 & 0 & 0 & 1 \\
0 & 0 & -1 & 0
\end{array}\right], \quad B_{0}=\left[\begin{array}{l}
0 \\
0 \\
0 \\
1
\end{array}\right] \epsilon(\theta), \quad C_{0}(\theta)=\left[\begin{array}{lll}
1 & 0 & 0
\end{array}\right]
\end{array}\right] \varepsilon(\theta),
哪里
重试
错误原因
epsilon(theta)=e^(-theta)\epsilon(\theta)=e^{-\theta}和epsi(theta)=e^(-2theta),theta in[0,+oo)\varepsilon(\theta)=e^{-2 \theta}, \theta \in[0,+\infty).一个有C=int_(0)^(+oo)C_(0)(theta)e^(-A theta)d theta=[0.4,-0.2,-0.12,0.16]C=\int_{0}^{+\infty} C_{0}(\theta) e^{-A \theta} d \theta=[0.4,-0.2,-0.12,0.16].其他参数和矩阵,即rho,B,P\rho, B, P和系统状态的初始函数被选择为 [25] 中的相同。可以验证假设 1-3 得到满足。当系统状态的完整信息可用于反馈控制时,可以从 [25] 获得 [25] 中给出的状态反馈控制器下的系统 (34) 是全局渐近稳定的。如果系统状态不可用于反馈控制,则采用观察器 (8) 来估计系统状态。让gamma=0.1\gamma=0.1以及 observer 的初始功能hat(x)(-theta)=[6e^((1)/(2)theta),2e^((1)/(2)theta),-6e^((1)/(theta)theta),-4e^((1)/(4)theta)]^(T),theta in[0,+oo)\hat{x}(-\theta)=\left[6 e^{\frac{1}{2} \theta}, 2 e^{\frac{1}{2} \theta},-6 e^{\frac{1}{\theta} \theta},-4 e^{\frac{1}{4} \theta}\right]^{T}, \theta \in[0,+\infty).可以计算出L=[0.86,-0.3179,0.0419,-0.016]^(T)L=[0.86,-0.3179,0.0419,-0.016]^{T}.因此,从定理 1 可以得出,由 (34) 和控制器 (21) 组成的闭环系统是全局渐近稳定的。状态响应和观察者错误响应分别如图 6 和图 7 所示。可以观察到,系统状态和观测器误差渐近收敛为零。
重试
错误原因